
【導(dǎo)讀】MEMS慣性測量組合是制導(dǎo)系統(tǒng)的關(guān)鍵部件,其失效將給整個系統(tǒng)帶來嚴(yán)重的后果。針對某一MEMS慣性測量組合的失效現(xiàn)象,列出失效故障樹,準(zhǔn)確地定位了失效部位,最后分析了其失效原因。對分析過程進行了詳細(xì)描述,以期對同類產(chǎn)品開展失效分析工作提供借鑒作用。
0 引言
慣性導(dǎo)航技術(shù)不僅在軍事領(lǐng)域,并且在陸地、航空、航天以及航海等許多領(lǐng)域都有廣泛的應(yīng)用。慣性器件是實現(xiàn)精確制導(dǎo)的關(guān)鍵子系統(tǒng),用于實時測量載體的角速率、加速度,以及位置、速度和姿態(tài)等信息,并同時參與制導(dǎo)系統(tǒng)的控制回路和制導(dǎo)回路。傳統(tǒng)的慣性系統(tǒng)由于體積大、成本高,已經(jīng)越來越不適應(yīng)現(xiàn)代武器裝備小型化的需求。
微機械電子系統(tǒng)(MEMS)是20世紀(jì)末興起的前沿性土程科學(xué),它是隨著半導(dǎo)體技術(shù)集成電路微細(xì)加工技術(shù)的迅速發(fā)展而崛起的一門多學(xué)科交叉的軍民兩用的高新技術(shù)。MEMS慣性器件是MEMS技術(shù)研究的一個重要方向,也是研制微型慣性導(dǎo)航系統(tǒng)的前提。MEMS慣性測量組合成本低、體積小、重力輕自主性強的特點,使得其在航空、航天、軍事等眾多領(lǐng)域中都有著十分廣闊的應(yīng)用前景。由于MEMS慣性測量組合在系統(tǒng)中的關(guān)鍵作用,導(dǎo)致其失效會給系統(tǒng)帶來嚴(yán)重的后果。本文結(jié)合某型號MEMS慣性測量組合失效的案例,對其進行失效分析,詳細(xì)描述了失效分析過程。
1 失效情況簡介
MEMS慣性傳感器的結(jié)構(gòu)主要包括機械感應(yīng)結(jié)構(gòu)和檢測電路兩大部分[4]此慣性測量組合由三個陀螺儀、三個線加速度計、數(shù)字電路、電源轉(zhuǎn)換電路、應(yīng)用軟件和結(jié)構(gòu)本體組成。其中陀螺儀用于敏感載體在三個正交軸上的角速度信息;線加速度計用于敏感載體在三個正交軸上的加速度信息;數(shù)字電路及其軟件用于對組件誤差進行補償,并將信息通過1路422通信接口回送給彈上計算機控制回路。同時,本產(chǎn)品具有自檢功能,能夠在發(fā)射前對其通訊狀態(tài)和設(shè)備工作狀態(tài)進行自檢。甲方在對進行一體化計算機進行振動試驗后進行測試時,發(fā)現(xiàn)產(chǎn)品加速度參數(shù)輸出異常。產(chǎn)品外觀如圖1所示。

圖1 慣性測量組合外觀
2 故障樹建立及失效定位
2.1 故障樹建立
此慣性測量組合的工作原理為利用三個相互垂直軸向的陀螺和加速度計敏感角速度和加速度信息,在傳感器內(nèi)轉(zhuǎn)化成角速度和加速度的數(shù)字量,通過數(shù)字系統(tǒng)進行整合、補償,然后通過422串口發(fā)出。系統(tǒng)結(jié)構(gòu)如圖2所示。

圖2 慣性測量組合系統(tǒng)結(jié)構(gòu)示意圖
組合采用兩層的結(jié)構(gòu)形式,陀螺和加速度計固定在PCB電路板上,電路板固定在底座的下層,實現(xiàn)角速率和線加速度的測量。信號轉(zhuǎn)換模塊單獨在一塊PCB板上,通過線纜與加速度計和陀螺連接,并被固定在底座的上層。其實物內(nèi)部結(jié)構(gòu)如圖3所示。

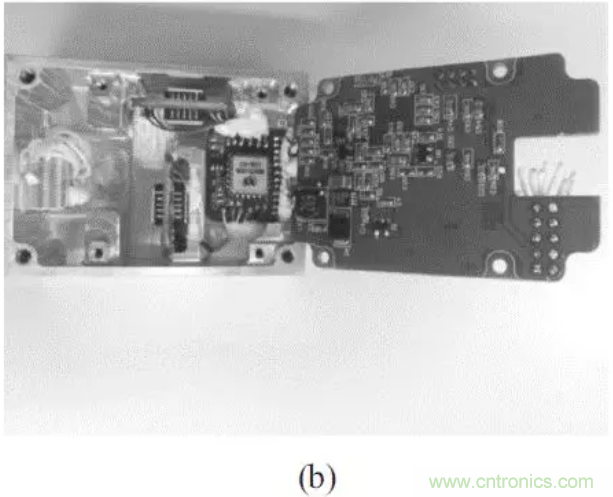
圖3 慣性測量組合內(nèi)部結(jié)構(gòu)照片
根據(jù)系統(tǒng)的構(gòu)成特點進行分析,參考GJB 768A-1998,列出失效故障樹如圖4所示。
2.2 失效定位
跟據(jù)上述故障樹,通過測試、分析、比對、排除等方式,進行失效定位。
(1)測試環(huán)境影響
首先使用該電源對同批次其他輸出正常慣性測量組合進行測試,未發(fā)生異常,然后使用另一電源對失效慣性測量組合進行測試,故障現(xiàn)象保持一致,故可以排除電源異常的影響。
檢查試驗設(shè)備有效期、接地,未發(fā)現(xiàn)異常,檢查振動試驗輸出圖譜,符合試驗要求,不存在過試驗現(xiàn)象,故可以排除振動試驗設(shè)備異常的影響。
(2)數(shù)據(jù)采集系統(tǒng)異常
通過兩種不同的數(shù)據(jù)采集系統(tǒng),分別對輸出異常的慣性測量組合進行復(fù)測,故障現(xiàn)象均保持一致;用振動試驗時采用的數(shù)據(jù)采集系統(tǒng)對輸出正常的慣性測量組合進行反復(fù)測試,輸出結(jié)果均符合要求。因此,數(shù)據(jù)采集系統(tǒng)的故障可以排除。
(3)軟件功能異常
1)軟件版本錯誤
對輸出異常的慣性測量組合進行了軟件版本的復(fù)查,確認(rèn)慣性測量組合使用的軟件版本不存在軟件版本錯誤的問題,可以排除此項目。為確認(rèn)軟件運行是否有錯,將此對故障的慣性測量組合進行了軟件版本的修改,將陀螺和加表的原始輸出引出,發(fā)現(xiàn)加表的輸出存在異?,F(xiàn)象。因此,可以排除軟件版本錯誤的可能性。

圖4 慣性測量組合輸出異常故障樹
2)參數(shù)加載錯誤
將失效慣性測量組合連接DSP仿真器,在線仿真,讀取故障慣性測量組合的參數(shù),并與備份的參數(shù)進行對比,發(fā)現(xiàn)兩者一致,可以排除參數(shù)加載錯誤的可能性。
3)軟件運行錯誤
將出現(xiàn)故障的慣性測量組合的數(shù)字處理單元與正常的加表連接,慣性測量組合輸出數(shù)據(jù)正常,因此,可以排除軟件運行錯誤。
(4)硬件電路異常
1)數(shù)字板異常定位
將慣性測量組合數(shù)字處理單元與故障加表連接,慣性測量組合輸出數(shù)據(jù)異常,電流異常,將數(shù)字處理單元與正常加表連接時,慣性測量組合輸出數(shù)據(jù)和電流均恢復(fù)正常。且在軟件功能異常的排查過程中,慣性測量組合的信號輸出正常,檢測陀螺的原始輸出也全部正常,因此可以排除數(shù)字處理單元和信號輸出單元的故障,但無法排除數(shù)字板與加表板之間接口的異常。
為進一步確認(rèn),將加表板與陀螺板互換位置后與數(shù)字板連接,發(fā)現(xiàn)陀螺的輸出信號仍然正常,而加表的輸出信號保持異常。因此可以排除數(shù)字板異常的可能性。
2)陀螺板異常定位
在上述排查過程中,陀螺的信號輸出始終保持正常,因此可以排除陀螺板異常的可能性。
3)加表板異常定位
在上述排查過程中,加速度計的信號輸出始終異常,因此無法排除加速度計板異常的可能性。由于加速度計板包括了加速度計和外圍元件兩部分,需要分別進行故障分析和定位。
a.外圍元件異常定位
首先,對故障的加速度計板進行目檢,未發(fā)現(xiàn)異常。在此基礎(chǔ)上,對加速度計進行了更換,發(fā)現(xiàn)加速度計板輸出信號正常。因此故障原因可以初步定位到加速度計故障。
b.加表故障定位
為確認(rèn)加速度計是否存在故障,對出現(xiàn)故障的電路板對應(yīng)的加速度計進行開蓋解剖分析。圖5所示為異常加表開蓋形貌。

圖5 異常加表開蓋形貌
通過開蓋分析,發(fā)現(xiàn)加速度計存在鍵合點開裂現(xiàn)象,經(jīng)過排查發(fā)現(xiàn),該批加速度計芯片粘接工序采用了新的工藝,但未針對該工藝優(yōu)化鍵合程序,導(dǎo)致鍵合經(jīng)歷試驗后出現(xiàn)鍵合點開裂現(xiàn)象,造成加速度計失效。
3 結(jié)束語
既存在MEMS工藝,還存在采用表面貼裝工藝,這就導(dǎo)致其結(jié)構(gòu)較為復(fù)雜,因此,其失效分析工作也較為復(fù)雜,失效定位顯得尤為重要。本文結(jié)合一個MEMS慣性測量組合失效的案例,列出了慣性測量組合的故障樹,進行了失效定位,分析了其失效原因。本文對其他MEMS器件的失效分析有一定的借鑒意義。
本文內(nèi)容轉(zhuǎn)載自《電子質(zhì)量》2018年第12期,版權(quán)歸《電子質(zhì)量》編輯部所有。
柳華光,張魁,黃杰,國家半導(dǎo)體器件質(zhì)量監(jiān)督檢驗中心
推薦閱讀:




