
【導(dǎo)讀】BQ25601是一款常用的充電芯片。本文針對(duì)其錯(cuò)誤上報(bào)的機(jī)制進(jìn)行了說明。同時(shí),本文針對(duì)該芯片實(shí)際應(yīng)用在可穿戴產(chǎn)品中碰到過的弱充問題進(jìn)行了問題分析和說明,并從系統(tǒng)層面給出了階梯式抬升充電電流的解決方案。
1. BQ25601簡(jiǎn)介
BQ25601是一款高效率的單電池降壓式充電管理芯片,其具有路徑管理功能,可以實(shí)現(xiàn)輸入和系統(tǒng)端以及電池側(cè)的充放電管理。該芯片可以支持到3A的充電電流,最小可以支持到60mA,被廣泛應(yīng)用在手機(jī),可穿戴等產(chǎn)品中。手冊(cè)中給出了典型的應(yīng)用電路以及相應(yīng)的設(shè)計(jì)案例,這里就不再贅述了。因?yàn)樵撔酒瑧?yīng)用非常廣泛,所以本文主要針對(duì)實(shí)際應(yīng)用過程中碰到的問題進(jìn)行分析總結(jié)。
2. BQ25601錯(cuò)誤中斷上報(bào)機(jī)制說明
在實(shí)際系統(tǒng)應(yīng)用中,我們經(jīng)常需用通過讀取芯片的狀態(tài)寄存器或是在硬件上檢查INT管腳的狀態(tài)來判斷芯片工作中是否有碰到異常,那么對(duì)于芯片的錯(cuò)誤上報(bào)機(jī)制以及中斷發(fā)出機(jī)制的理解就很重要,有助于實(shí)際的調(diào)試。根據(jù)手冊(cè)中描述如下,當(dāng)出現(xiàn)故障時(shí),BQ25601會(huì)發(fā)出INT信號(hào)給到host, 并將對(duì)應(yīng)的狀態(tài)寄存器REG09中的對(duì)應(yīng)bit置位。INT信號(hào)會(huì)被拉低256us, 然后再恢復(fù)。
Fig 1 手冊(cè)中關(guān)于發(fā)生fault時(shí)INT和狀態(tài)寄存器的描述 (1)
而實(shí)際使用過程中,有時(shí)候會(huì)碰到同時(shí)出現(xiàn)多個(gè)錯(cuò)誤,
a. 第一個(gè)錯(cuò)誤出現(xiàn)時(shí),INT信號(hào)被拉低,如果在拉低的過程中,又出現(xiàn)了第二個(gè)錯(cuò)誤,此時(shí)INT信號(hào)不會(huì)繼續(xù)延展,只會(huì)看到一個(gè)256us的INT拉低的指示。
b. 第一個(gè)錯(cuò)誤出現(xiàn)時(shí),INT信號(hào)被拉低。在256us內(nèi)第一個(gè)故障消失,而第二個(gè)故障出現(xiàn)。此時(shí)INT信號(hào)依然不會(huì)延展,還是只會(huì)看到一個(gè)256us INT拉低的指示。
所以實(shí)際使用過程中,如果只看到一個(gè)INT信號(hào)拉低的指示,并不代表實(shí)際只有一個(gè)fault出現(xiàn),還是需要通過狀態(tài)寄存器去讀取實(shí)際出現(xiàn)的問題,INT信號(hào)只會(huì)在所有故障或是DPM狀態(tài)被清除后,才會(huì)再次起作用。 而對(duì)于狀態(tài)寄存器的讀取來說,手冊(cè)中有相關(guān)描述,需要注意的是,該寄存器是讀清,所以如果需要判斷當(dāng)前芯片是否有故障存在,需要讀兩次REG09,第一次是用來清之前的fault, 第二次才能判斷當(dāng)前是否有fault存在。
3. BQ25601弱充問題
在可穿戴等應(yīng)用場(chǎng)景中,諸如智能手表等,充電是通過觸點(diǎn)等方式將充電座和充電接口相連。在實(shí)際中接口處經(jīng)常會(huì)存在接觸不良或者有污漬的場(chǎng)景,這樣就會(huì)導(dǎo)致充電器端的實(shí)際輸出能力下降。于是客戶在產(chǎn)品中加入了該場(chǎng)景的模擬測(cè)試:將輸入電源的輸出限流點(diǎn)設(shè)定在一個(gè)較小的值,要求在該場(chǎng)景下電池還是能夠繼續(xù)充電,否則就會(huì)影響客戶的使用體驗(yàn)。
這邊將輸入電源Vbus設(shè)置為5V/100mA ( 100mA為輸出限流點(diǎn),相比于實(shí)際場(chǎng)景應(yīng)該已經(jīng)足夠小) 。受電設(shè)備設(shè)置預(yù)充電流為0.18A, 快充電流為0.78A。Fig2 是用TI的GUI軟件讀取的此時(shí)的充電芯片的配置。同時(shí),充電芯片的系統(tǒng)側(cè)會(huì)消耗70mA左右的電流。

Fig2 BQ25601在某可穿戴項(xiàng)目中配置
(VINDPM=4.4V, Ipre-charge=60mA, Icharge=780mA, Isys=~70mA)
在實(shí)際測(cè)試中發(fā)現(xiàn),當(dāng)電池電壓較低時(shí),會(huì)出現(xiàn)停充,即電池電壓始終無法持續(xù)充高。從波形上看,Vbus有較大跌落,導(dǎo)致芯片不工作,而系統(tǒng)端此時(shí)因?yàn)樾枰╇娺€不斷在消耗電流,所以電池電壓始終卡在某一點(diǎn),而無法充電到更高電壓,這是不可接受的。正常來說,由于VINDPM的存在,即使后端負(fù)載過大,Vbus電流能力不足,那么Vbus電壓應(yīng)該也會(huì)被鉗位在VINDPM而不會(huì)跌落到工作門限以下,導(dǎo)致充電芯片出現(xiàn)不工作的場(chǎng)景。
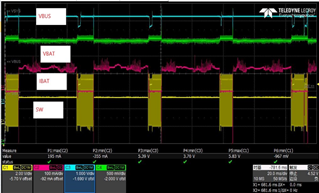
Fig3 電池停充的相關(guān)波形 ( Ch1=SW, Ch2=Ibat, Ch3=Vbus, Ch4=Vbat)
為了復(fù)現(xiàn)該問題,在EVM上進(jìn)行模擬實(shí)驗(yàn),搭建實(shí)驗(yàn)環(huán)境如下,輸入電源power supply #1還是設(shè)置為5V/100mA。實(shí)際電池采用模擬電池電源來替代,以便于監(jiān)控電流。在系統(tǒng)端(sys)采用電子負(fù)載,設(shè)置恒流CC模式來模擬實(shí)際系統(tǒng)的電流消耗。將模擬電池的電壓從2.5V不斷往上調(diào)高,來模擬充電過程中不同的電池電壓情況,觀察在這個(gè)過程中,是否會(huì)存在停充的現(xiàn)象。

Fig4 模擬故障的實(shí)驗(yàn)環(huán)境搭建 (2)
從測(cè)試可以看到當(dāng)Vbat電壓在3V左右會(huì)出現(xiàn)如Fig2 中類似的情況,而在其他電壓的情況下,Vbus即使因?yàn)殡娏髂芰Σ蛔銓?dǎo)致被拉下來,但還是能夠被鉗位在VINDPM的電壓值,而不會(huì)更低。從Fig5中可以看到當(dāng)電池電壓在2.9V和3.2V時(shí),輸入Vbus會(huì)被鉗位到VINDPM的值,即設(shè)定的4.4V,不會(huì)出現(xiàn)跌落的場(chǎng)景。

從手冊(cè)中可以看到,3V左右是芯片從pre-charge到fast-charge的切換點(diǎn),對(duì)Vbat=3.0V時(shí)波形展開,如Fig6,

Fig6 Vbat=3V時(shí)Vbus跌落的展開圖(Ch1=Vbus, Ch2=Vsys, Ch3=Vbat, Ch4=SW)
可以看到,充電電流從在70us內(nèi)變化了有400多mA, 在b點(diǎn)VINDPM的環(huán)路開始響應(yīng),開始減少充電電流,但從c點(diǎn)可以看到,VINDPM的環(huán)路沒辦法將充電電流控住,從而Vbus發(fā)生跌落,跌落至工作門限以下。此時(shí)芯片停止工作,Vbus由于負(fù)載變輕,又恢復(fù)到正常電壓。但恢復(fù)到正常電壓后,又重新進(jìn)入上電流程,芯片要重新進(jìn)行poor source檢測(cè),需要~30ms左右的時(shí)間,這個(gè)過程中系統(tǒng)端只能由電池來供電。從上面分析可以看到,其本質(zhì)原因是在于VINDPM的響應(yīng)時(shí)間比芯片從預(yù)充到快充的充電電流變化時(shí)間要慢,所以VINDPM在這種大負(fù)載切換時(shí)來不及起作用,導(dǎo)致Vbus電壓被拉下來,從而導(dǎo)致無法充電。而實(shí)際采用真實(shí)電池時(shí),在中間進(jìn)入supple mode的階段,電池因?yàn)樵谙哪芰克噪妷簳?huì)被拉下來,等到再次恢復(fù)充電的時(shí)候,電池電壓比較低,所以還是在進(jìn)行預(yù)充電階段,當(dāng)切入快充階段時(shí),又會(huì)進(jìn)入到停充的狀態(tài),所以導(dǎo)致電池電壓一直無法充到3V以上,進(jìn)入正常的快充狀態(tài)。
那針對(duì)這個(gè)問題,因?yàn)閂INDPM的響應(yīng)時(shí)間是跟它環(huán)路本身的響應(yīng)有關(guān),這個(gè)是沒辦法修改的,那么我們可以從系統(tǒng)層面去解決這個(gè)問題。可以將充電電流的抬升從直接抬升,改為階梯式的抬升,讓每次的電流跳變幅度沒有那么大,這樣可以使得輸入電壓在這樣小的跳變下不會(huì)被拉低到工作電壓點(diǎn)以下。同時(shí)應(yīng)該本身是穿戴類的應(yīng)用,其電池容量也比較小,所以這種臺(tái)階式的充電電流抬升對(duì)整體的充電時(shí)間影響也基本可以忽略。

Fig7a 原先的充電策略

Fig7b 新的充電策略
結(jié)合電容的電壓電流特性Cdu/dt=I,可以得到公式(1)如下
其中,Cin是輸入電容, 最極限的情況就是所有能量都由Cin提供,輸入電源本身還來不及響應(yīng);
Vbus是輸入電源電壓,Vbusfalling是芯片工作電壓點(diǎn),在手冊(cè)中可以看到為3.9V( typical), 這邊要確保輸入電壓不會(huì)跌落到欠壓門限以下,所以從正常工作的Vbus到欠壓點(diǎn)之間的壓差就是(Vbus-Vbusfalling),也即之前電容特性公式中的du;
TVINDPM是VINDPM的對(duì)應(yīng)的響應(yīng)時(shí)間,從前面的測(cè)試波形可以得到。在這段時(shí)間內(nèi),VINDPM來不及響應(yīng),那么電容上的電壓就可能會(huì)跌落到VINDPM設(shè)定門限以下;
(Ich1-Ich2)為充電電流跳變步進(jìn),Vbat為此時(shí)電池電壓,?為充電效率,可以通過手冊(cè)效率曲線得到。假設(shè)系統(tǒng)端電流是穩(wěn)定的,通過“充電電流*電池電壓/充電效率” 就可以得到充電芯片輸入端電流變化,也就是此時(shí)輸入電容上被抽走的電流,它會(huì)導(dǎo)致電壓跌落。
用這個(gè)公式可以大致算出,要使得Vbus電壓不要跌落到欠壓點(diǎn)以下時(shí),充電電流最大的變化值,也就是臺(tái)階式去抬升電流的最大的臺(tái)階。
這邊取Cin=10uf, Vbus=5V, Vbat=3V, tindpm= ~100us, 效率就按~80%,得到充電電流的每一個(gè)臺(tái)階是~0.15A。在TVINDPM時(shí)間后按照這個(gè)臺(tái)階去抬升充電電流,即可以保證輸入電壓始終處于工作狀態(tài)內(nèi)。
結(jié)論
本文針對(duì)BQ25601的錯(cuò)誤上報(bào)機(jī)制進(jìn)行了說明,在多個(gè)錯(cuò)誤同時(shí)發(fā)生的情況下依然只會(huì)有一個(gè)INT信號(hào),需要去進(jìn)行二次讀取狀態(tài)寄存器來判斷當(dāng)前狀態(tài)。同時(shí),本文對(duì)實(shí)際在可穿戴應(yīng)用中碰到的弱充問題進(jìn)行了分析,原因在于輸入DPM的調(diào)節(jié)速度要慢于充電電流的調(diào)節(jié)速度,導(dǎo)致輸入電壓被拉低。給出了階梯式充電的解決方案,通過系統(tǒng)端來避免出現(xiàn)停充的問題。
參考文獻(xiàn)
[1] BQ25601 Datasheet, SLUSCK5, Texas Instruments.
[2] BQ25601 EVM guide, SLUUBL4, Texas Instruments.
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)聯(lián)系小編進(jìn)行處理。
推薦閱讀:



