

【導(dǎo)讀】如何使用集靈活性和高集成度于一身的全能ADC—— μModule數(shù)據(jù)采集系統(tǒng)ADAQ798x系列呢?ADI工程師為此撰寫(xiě)了6篇博客,目的是幫助系統(tǒng)您充分利用ADAQ798x系列的靈活前端,并說(shuō)明它可以如何配置以適應(yīng)不同應(yīng)用。
之前我們分享了該系列博客前兩篇,主要介紹了兩個(gè)問(wèn)題
如何與小于ADC輸入范圍的單極性輸入源接口?
為何要配置ADC驅(qū)動(dòng)器?
點(diǎn)擊可查看→ 全能ADC,你應(yīng)該這樣用(連載 上)即可查看。
今天,我們來(lái)看看該系列博客的第三篇和第四篇——同相求和配置以及支持衰減的同相求和配置。
同相求和配置
雙極性信號(hào)在低電壓(0 V)上下擺動(dòng)。由于 ADAQ798x 集成 ADC 只能轉(zhuǎn)換0 V 到 VREF 的信號(hào),所以針對(duì)該 ADC,需要將雙極性信號(hào)加以直流偏置和適當(dāng)調(diào)整。為了完成這一任務(wù),以下配置給標(biāo)準(zhǔn)同相配置增加了兩個(gè)電阻(R1和R2)。

此配置將輸入信號(hào)與一個(gè)單獨(dú)的直流電壓求和,以將ADC驅(qū)動(dòng)器輸出偏置到ADC中間電平輸入(VREF/2),從而實(shí)現(xiàn)雙極性到單極性的轉(zhuǎn)換?;鶞?zhǔn)電壓(VREF)用作直流電壓常常是可行的,這樣就無(wú)需其他電路(反正ADAQ798x總是伴隨一個(gè)基準(zhǔn)電壓源!)。它還能防止VREF偏差給系統(tǒng)增加失調(diào)誤差,因?yàn)锳DC驅(qū)動(dòng)器的直流偏置總是VREF的一半。鑒于這些原因,我們將專(zhuān)門(mén)討論這種將VREF用作直流“變換”電壓的配置。
此配置的傳遞函數(shù)如下:

與普通同相配置類(lèi)似,Rf和Rg之比決定從IN+到AMP_OUT的增益,但此比值現(xiàn)在也依賴(lài)于vIN的輸入幅度。注意vIN為雙極性,但同相節(jié)點(diǎn)上的電壓為單極性。這意味著,對(duì)應(yīng)于vIN的最小值,IN+上的電壓必須為0 V:

由此關(guān)系可得出R1和R2之比:

Rf和Rg可利用該配置的傳遞函數(shù)以及vIN為0 V時(shí)ADC驅(qū)動(dòng)器輸出(vAMP_OUT)等于VREF/2的條件來(lái)確定。求解Rf和Rg的方程可得:

現(xiàn)在有了R1和R2之比及Rf和Rg之比,但我們還需要挑選特定的值。我們已在該系列博客《增加單極性輸入的增益》中討論了Rf和Rg值的選擇。R1和R2的選擇應(yīng)基于應(yīng)用的噪聲、精度和輸入阻抗要求確定。小電阻會(huì)改善噪聲,可降低其與ADC驅(qū)動(dòng)器輸入偏置電流相互作用所引起的失調(diào)誤差,但若要提高輸入阻抗并降低基準(zhǔn)源的輸出電流,則需要大電阻。此電路的輸入阻抗為:

注意,對(duì)于vIN幅度為±VREF的特殊情況,Rf和Rg之比為0。這種情況下,ADC驅(qū)動(dòng)器增益為1,意味著省去Rg,Rf可以為0 Ω。
舉例說(shuō)明
ADAQ7980需要對(duì)±1 V輸入信號(hào)執(zhí)行雙極性到單極性轉(zhuǎn)換,VREF= 5 V,使用Rf= 2 kΩ。利用上述公式,R2須為R1的5倍,Rf須為Rg的2倍。Rf為2 kΩ,所以Rg須為1 kΩ。R1和R2的具體值可根據(jù)應(yīng)用要求選擇。對(duì)于本例,我們希望選擇R1和R2的組合來(lái)抵消輸入偏置電流對(duì)失調(diào)誤差的影響。技術(shù)文章《運(yùn)算放大器輸入偏置電流》中已經(jīng)闡明,為實(shí)現(xiàn)此目的,R1||R2應(yīng)等于Rf||Rg,故R1= 800 Ω,R2= 4 kΩ。
我們?cè)倏紤]一個(gè)例子:vIN = ±10 V,VREF = 5 V。這種情況下,我們會(huì)遇到Rf和Rg之比為負(fù)數(shù)的問(wèn)題,所以利用這種配置實(shí)際上不能實(shí)現(xiàn)該輸入范圍。事實(shí)上,適合此配置的最大vIN為±VREF,此時(shí)ADC驅(qū)動(dòng)器增益等于1。幸運(yùn)的是,我們會(huì)在本系列接下來(lái)的文章中討論其他兩種允許我們超出此輸入范圍的配置。
若將R2接地而不是接VREF,則以上配置也可用于單極性信號(hào)。這一修改對(duì)需要衰減以用于ADC的單極性輸入信號(hào)(幅度大于VREF)有用。這種情況下,ADC驅(qū)動(dòng)器極有可能是單位增益,故不需要Rf和Rg。
如上所述,如果應(yīng)用要求高輸入阻抗,則R1和R2必須很大,這可能會(huì)提高系統(tǒng)的本底噪聲。我們可以通過(guò)增加分流電容和/或通過(guò)過(guò)采樣和抽取來(lái)補(bǔ)償噪聲增加。兩種方案均通過(guò)損失輸入信號(hào)帶寬來(lái)降低本底噪聲。但是,對(duì)于低帶寬或直流應(yīng)用,輸入帶寬不那么重要。因此,這些配置更適合低帶寬、高輸入阻抗應(yīng)用。我們將在下一篇文章中更詳細(xì)討論這個(gè)話題。
然而,有一個(gè)問(wèn)題未涉及,那就是ADC驅(qū)動(dòng)器流過(guò)電阻的輸入偏置電流所引起的失調(diào)誤差。電阻越大,引起的直流誤差越大。通過(guò)調(diào)整R1和R2之比以補(bǔ)償不需要的壓降,或通過(guò)選擇Rf和Rg的值來(lái)抵消R1和R2引起的失調(diào),可以降低此誤差,不過(guò)輸入范圍會(huì)有損失。但應(yīng)注意,Rf 必須足夠小以確保放大器穩(wěn)定,故第二種方案并不總是可行。
支持衰減的同相求和配置
針對(duì)大于±VREF的信號(hào),可采用以下配置來(lái)執(zhí)行帶衰減的雙極性到單極性轉(zhuǎn)換。

此配置與上文的【同相求和配置】討論的配置相似,區(qū)別在于不再需要Rf和Rg,但增加了R3以提供額外的信號(hào)衰減。此配置的傳遞函數(shù)如下:

這次求得R1、R2和R3之比的數(shù)學(xué)計(jì)算較為復(fù)雜,但我們可以使用同之前配置相似的方法。求出電阻之比后,便可根據(jù)應(yīng)用需求選擇具體的值。為了簡(jiǎn)潔起見(jiàn),這里不敘述推導(dǎo)的每一步,但我們會(huì)看到,對(duì)于vIN的最小值和最大值,傳遞函數(shù)的簡(jiǎn)化使我們能得出電阻比。
R1和R2之比是利用該配置的傳遞函數(shù)并代入vIN最小值(使得vAMP_OUT等于0 V)而得出:

R3不出現(xiàn)在公式中,求解R1和R2得到:

R1和R3之比是代入vIN最大值(使得vAMP_OUT等于VREF)而得出:

這一次,R2不出現(xiàn),求解R1和R3得到:
此時(shí),我們可以選擇其中任一電阻的值(考慮VREF和vIN范圍),然后計(jì)算另兩個(gè)電阻的值。像以前一樣,主要權(quán)衡因素是輸入阻抗與系統(tǒng)噪聲和失調(diào)誤差。此電路的輸入阻抗(ZIN)為:

再次考慮該上文【同相求和配置】部分的例子,其中vIN = ±10 V,VREF = 5 V,用1 MΩ的輸入阻抗設(shè)計(jì)該配置。對(duì)于vIN和VREF的這種組合,R1須為R2的2倍,且等于R3。將R2和R3與R1的比值用于輸入阻抗公式,得到R1 = 750 kΩ。因此,R2和R3分別為375 kΩ和750 kΩ。
正如上文【同相求和配置】所述,需要權(quán)衡輸入阻抗與系統(tǒng)噪聲性能。實(shí)現(xiàn)高輸入阻抗需要大電阻,而后者會(huì)產(chǎn)生更多熱噪聲,并與ADC驅(qū)動(dòng)器的輸入電流噪聲相互作用,產(chǎn)生更多輸入電壓噪聲。二者均會(huì)提高ADC輸入端的有效均方根電壓噪聲,導(dǎo)致性能大幅降低。在上例中,系統(tǒng)總噪聲約為334 μV rms(使用5 V基準(zhǔn)源時(shí),動(dòng)態(tài)范圍降低整整15.5 dB,從92 dB降至74.5 dB)!
但還有希望!如果限制輸入帶寬,這種配置實(shí)際上可以實(shí)現(xiàn)接近最優(yōu)的性能。例如,若將上例中的輸入帶寬限制為20 kHz,則全系統(tǒng)噪聲幾乎降低10倍,達(dá)到48 μV rms(對(duì)于VREF = 5 V,動(dòng)態(tài)范圍為91.4 dB)!我們可以通過(guò)增加分流電容CS來(lái)限制輸入帶寬(BWin),如下圖所示。注意,對(duì)于這些噪聲計(jì)算,我們可以將R1、R2和R3看作單個(gè)電阻RS,其中RS為R1、R2和R3的并聯(lián)組合。

技術(shù)指南《單極點(diǎn)系統(tǒng)的運(yùn)算放大器總輸出噪聲計(jì)算》說(shuō)明了如何計(jì)算RS產(chǎn)生的噪聲(包括熱噪聲及其與ADC驅(qū)動(dòng)器輸入電流的相互作用)。ADAQ798x 的主要區(qū)別在于噪聲帶寬是由集成RC濾波器設(shè)置,而不是指南中的放大器帶寬。RS給ADC輸入端增加的有效值噪聲為:
(en為RS的約翰遜噪聲,G為ADC驅(qū)動(dòng)器增益。)

CS通過(guò)降低ADC驅(qū)動(dòng)器的輸入帶寬來(lái)減小到達(dá)ADC的噪聲。如果RS和CS的截止頻率遠(yuǎn)小于集成RC濾波器的截止頻率(4.42 MHz),則RS的噪聲貢獻(xiàn)可以利用RS和CS計(jì)算,代替上式中的R和C。
系統(tǒng)總噪聲為ADAQ798x中各噪聲源的和方根,包括RS的噪聲、ADC驅(qū)動(dòng)器的輸入電壓噪聲和ADC的有效值噪聲。下圖顯示了多個(gè)RS值對(duì)應(yīng)的系統(tǒng)噪聲與輸入帶寬的關(guān)系。
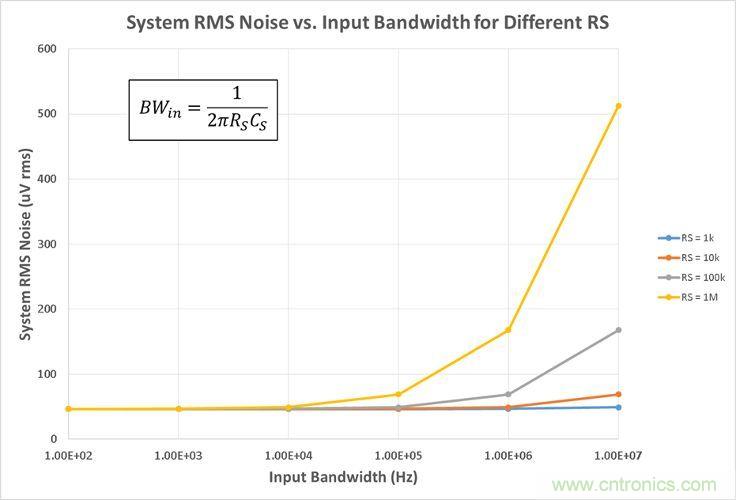
注意隨著輸入帶寬降低,全系統(tǒng)噪聲趨向于ADAQ798x的總有效值噪聲(44.4 μV rms)。這意味著降低帶寬所獲得的減噪收益會(huì)在某一頻率遞減,該頻率取決于RS有效值。
本部分討論了一種允許 ADAQ798x 接受大于±VREF的雙極性輸入的ADC驅(qū)動(dòng)器配置,并說(shuō)明了如何基于電阻值(以及可選的分流電容CS)計(jì)算輸入阻抗和系統(tǒng)噪聲。
雖然已證明增加CS可降低噪聲,但它也會(huì)限制可用輸入帶寬。因此,將此配置用于寬帶寬應(yīng)用時(shí),要實(shí)現(xiàn)高輸入阻抗常常是不切實(shí)際的。此配置僅推薦用于需要高輸入阻抗的低帶寬應(yīng)用。
推薦閱讀:


