

【導讀】通常認為,平均電流模式控制的性能可充分滿足大部分 50/60Hz AC 線路輸入的商用電源應用需求。但是,傳統(tǒng)平均電流模式控制會使電感器電流領先于輸入電壓,導致不統(tǒng)一的基本位移功率因數(shù)與過零失真。在 PFC 工作在高頻率 AC 環(huán)境下時,這種情況會變得更糟糕,例如工作在 400Hz 下的機載系統(tǒng)。這些系統(tǒng)所需的高質(zhì)量輸入電流很難通過傳統(tǒng)控制方法實現(xiàn)。一種名為占空比前饋 (DFF) 控制的最新控制方法可有效降低高線路頻率下的輸入電流失真1/2/3。
幾十年來,平均電流模式控制一直用于功率因數(shù)校正 (PFC),而且在商業(yè)市場也有各種采用這種控制算法的 PFC 控制芯片。
圖 1 是這種平均電流模式控制的形象介紹。
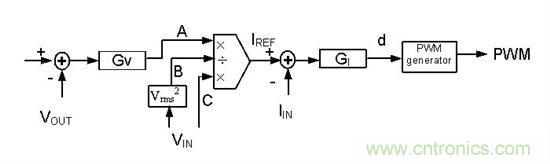
圖 1. PFC 的平均電流模式控制
通常認為,平均電流模式控制的性能可充分滿足大部分 50/60Hz AC 線路輸入的商用電源應用需求。但是,傳統(tǒng)平均電流模式控制會使電感器電流領先于輸入電壓,導致不統(tǒng)一的基本位移功率因數(shù)與過零失真。在 PFC 工作在高頻率 AC 環(huán)境下時,這種情況會變得更糟糕,例如工作在 400Hz 下的機載系統(tǒng)。這些系統(tǒng)所需的高質(zhì)量輸入電流很難通過傳統(tǒng)控制方法實現(xiàn)。一種名為占空比前饋 (DFF) 控制的最新控制方法可有效降低高線路頻率下的輸入電流失真1/2/3。
DFF 控制的基本構(gòu)想是預先計算占空比,以減輕反饋控制器的任務。對于工作在連續(xù)傳導模式下的升壓拓撲來說,占空比 dFF 的計算公式為:
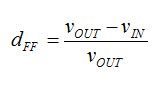 公式 1
公式 1該占空比模式在開關兩端產(chǎn)成一個電壓,其在整個開關周期內(nèi)的平均值等于整流輸入電壓。常規(guī)電流環(huán)路補償器會圍繞這個計算出的占空比模式改變占空比。
由于升壓電感器在線路頻率下的阻抗非常低,因此很小的占空比變化就會在整個電感器上產(chǎn)生足夠的電壓,以生成所需的正弦電流波形。
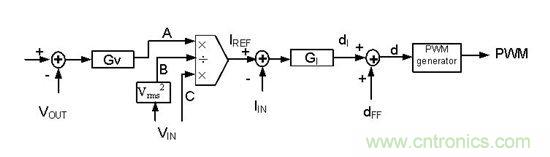
圖 2. PFC 的占空比前饋控制
圖 2 是獲得的控制方案。公式 1 可計算前饋占空比 dFF。然后它可添加至傳統(tǒng)平均電流模式控制輸出 dI。最終的占空比 d 可用來生成控制 PFC 的脈寬調(diào)制 (PWM) 波形。
使用 DFF 控制時,需要很多數(shù)學計算。CPU 的速度可決定控制環(huán)路的速度,進而影響環(huán)路帶寬。更快的 CPU 就意味著可實現(xiàn)更高的帶寬。然而,這也意味著更高的成本與功耗。
當我使用德州儀器 (TI) 數(shù)字控制器 UCD3138 實施這一控制算法時,我利用 UCD3138 的硬件數(shù)字補償器以相對較低的 CPU 速度實現(xiàn)了高帶寬。
UCD3138 中的數(shù)字補償器是一個增加了一個 α 的傳統(tǒng) PID 結(jié)構(gòu),可提供雙極雙零補償(圖 3)。P、I 和 D 是三個獨立分支,合并輸出后可生成最終的控制信號。數(shù)字補償器運行速率高達 2MHz。由于 PFC 電流環(huán)路是一階系統(tǒng),因此通常情況下 PI 控制器已足夠進行補償。這可騰出 D 分支,用來提高 DFF 控制速度。
仔細觀察圖 2。盡管 IREF 和 dFF 由速度有限的 CPU 計算,但數(shù)字補償器和 PWM 生成器是 UCD3138 的硬件,因此它們的運行速度更快。這就意味著 dI 能以高速進行計算。因而其實 dFF + dI = d,其可降低控制環(huán)路速度。如果 dFF + dI = d 也能通過硬件完成,那么不僅整個環(huán)路速度會比以前快,而且?guī)捯矔岣摺?/div>
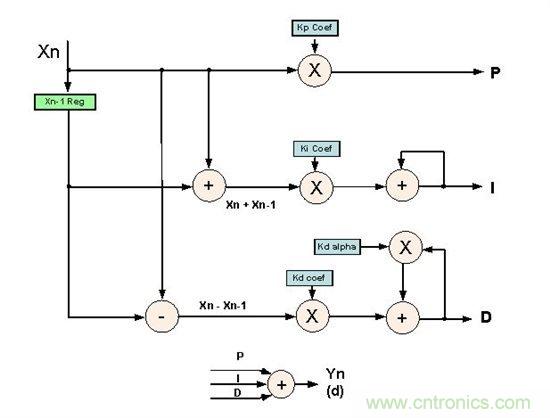
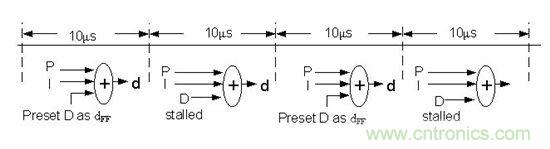
圖 3. UCD3138 的 PID 結(jié)構(gòu)
D 分支有兩個高級特性:
1. 輸出可設置為預定義值
2. 它可能會中止(凍結(jié)),使其輸出維持當前值
我們可利用這兩個特性增強 DFF 控制。
例如,電流控制環(huán)路必須是 100KHz,但由于 CPU 速度的限制,dFF 最多只能在 50KHz 速率下進行計算。完成計算后,將 D 分支輸出預設為 dFF,然后中止。盡管 dFF 在 50kHz 下計算,但是 P、I 和 d = P + I + dFF 都在更快的 100KHz 速率下運行,因此 PWM 可在 100kHz 下更新。有效的控制環(huán)路將在 100kHz 下運行。該過程請參見圖 4。
圖 4. 將 DFF 與 UCD3138 PID 結(jié)構(gòu)結(jié)合
有了更快的控制環(huán)路速度,就可提高帶寬,從而改善 THD 和 PF。UCD3138 的獨特結(jié)構(gòu)可提供改進的 DFF 實施方案。
推薦閱讀:




